





Abstract
In the face of escalating natural and man-made disasters, the breakdown of critical communication and navigation infrastructures poses immense challenges for rescue operations. This article proposes an innovative approach to address these challenges by harnessing drone technology, visual odometry, and image stitching to create high-resolution, real-time maps of disaster-stricken areas. The algorithm incorporates artificial gridlines for precise navigation in non-Global Positioning System environments. The method, demonstrated through a comprehensive Python code, offers timely and accurate spatial insights crucial for efficient disaster recovery operations. By overcoming the limitations of traditional satellite-based mapping, this approach provides a cost-effective, agile, and deployable solutions. The article discusses the algorithm’s robustness, hardware considerations, and practical applications, emphasising its potential to revolutionise disaster response strategies and contribute to resilient disaster recovery efforts.
Introduction
In a world rife with both natural and man-made disasters, the grim reality of simultaneous breakdowns in critical lifelines becomes apparent. Picture a scenario where the pillars of modern communication and navigation internet and Global Positioning System (GPS) crumble, throwing society into chaos. Rescue teams grapple with communication breakdowns, isolation, and a dearth of real-time information, hindering effective response. Navigating disaster zones becomes perilous without GPS guidance, compounded by complex topography and obstacles. Resource management falters due to limited supplies and inefficient distribution, risking lives in underserved areas. Safety concerns loom large as situational awareness diminishes, and specialised training for autonomous systems becomes imperative. The psychological toll is profound, with rescue teams battling isolation, uncertainty, and heightened stress. Roads lie in ruins, disrupting vital networks, and telecommunication failures exacerbate the crisis. In this non-GPS environment, the remedy lies in the creation of cutting-edge maps with artificial grids for navigation- a beacon of hope in a landscape marred by uncertainty.1
Understanding Disaster Environment
In the aftermath of such disasters, orchestrating rescue efforts involves collaborative efforts from diverse teams. The challenges arising from this amalgamation underscore the need for comprehensive ‘Situation Awareness’ as a pivotal prelude to deploying these teams. The command-and-control centre faces the crucial task of understanding the dynamic and chaotic situation on the ground before activating rescue teams. Achieving real-time Situation Awareness becomes paramount, laying the foundation for subsequent operations.2
The integration of non-native rescue teams introduces complexity, requiring synchronisation of disparate capabilities, procedures, and communication protocols. Recognising the axiom that ‘One picture is more than a thousand words’, the urgent need for a current and accurate map becomes evident. Time is critical in disaster scenarios, and the absence of immediate spatial insights hampers decision-making. A recent map, though procedurally intricate to obtain, emerges as a transformative asset for the command-and-control centre.3

Figure 1: Illustration of the components of a catastrophic scenario
Considering the above, the problem statement boils down to ‘Stitch multiple map images of the disaster struck areas, clicked by drones, and lay down Artificial Intelligence (AI) Grid to enhance navigation in non-GPS environment’. The phase for the project is follows:
n Stitch multiple map images of the disaster struck areas, clicked by drones.
n To lay an AI grid to enhance navigation facility.4
Technology Gap
The technology gap in disaster mapping arises primarily from the limitations of traditional satellite-based approaches. Traditional satellite mapping relies on satellites orbiting the Earth, and these systems face inherent challenges that hinder their effectiveness in the context of disaster response.5
One significant drawback is the predetermined nature of satellite orbits. Satellites follow fixed paths, and their revisit times to specific locations are not immediate. This lack of immediacy in revisiting disaster-stricken areas can result in outdated maps that do not accurately represent the current conditions during a crisis. The static nature of satellite orbits becomes a bottleneck in capturing real-time changes, a critical factor for effective disaster response. Another critical limitation is the susceptibility of satellite mapping to adverse weather conditions. Unfavourable weather, such as storms or cloud cover, can obstruct satellite data acquisition. This susceptibility introduces gaps in spatial information, hindering the creation of comprehensive and up-to-date disaster maps. In a scenario where timely and accurate information is crucial, reliance on satellite mapping’s weather-dependent nature becomes a significant impediment.6
The bureaucratic procedures associated with satellite technology also contribute to the technology gap. Obtaining regulatory approvals, national security clearances, and conducting environmental impact assessments are time-consuming processes that delay the deployment of satellite-based mapping solutions. Privacy and security concerns add another layer of complexity, necessitating meticulous adherence to regulations, customs procedures, and import/export rules. The centralised nature of satellite data distribution and archiving further complicates the swift acquisition of real-time data during crises.7
Contrastingly, emerging technologies like drone image stitching present a transformative solution to bridge this technology gap. Drones offer a more agile and adaptable approach to disaster mapping. They can be rapidly deployed to capture real-time information, providing immediate decision-making support to rescue teams. Drones overcome the revisit time limitations of satellites, enabling quick and targeted mapping of disaster areas. Their flexibility and ability to operate in diverse weather conditions ensure that mapping efforts are not hindered by atmospheric challenges.8
The adaptability of drone mapping technology allows for on-demand mapping tailored to the specific needs of disaster areas. Drones can capture high-resolution imagery, surpassing the limitations of satellite maps, and offer a detailed and accurate representation of the disaster scene. The immediate availability of these detailed latest maps facilitates efficient resource allocation, enhances situational awareness, and significantly improves the overall effectiveness of emergency responses.9
Methodology
The real-time, high-resolution geospatial images acquired by drones are seamlessly stitched together using advanced computer vision algorithms. This process yields detailed and comprehensive maps of the affected regions. The significance lies in the immediate and accurate spatial insights gained, facilitating resilient planning for disaster recovery operations. By providing up-to-date and procedurally intricate maps, this approach becomes a transformative asset for command-and-control centres, ultimately contributing to more successful disaster recovery operations.10
The creation of artificial longitudes and latitudes using AI emerges as a crucial component with numerous benefits. In the absence of traditional GPS-based coordinates, the proposed artificial gridlines overlayed on stitched maps offer a systematic and locally recognised reference system. Each intersection on the grid represents a unique point on earth, allowing for precise navigation and pinpoint location determination. The customisation of artificial gridlines for specific disaster areas enhances navigation accuracy, adapting to local terrain and providing targeted assistance. The flexibility of the artificial grid not only facilitates navigation but also serves as a means of communication for localisation. The use of AI in creating these gridlines contributes to enhanced situational awareness for rescue teams, offering a practical solution for precise navigation in challenging and dynamic environments during disaster recovery missions.11
Challenges in methodology
Addressing diverse challenges in image stitching and grid generation is crucial for achieving seamless and accurate outcomes. Firstly, variations in image sizes and resolutions pose a significant hurdle. To overcome this, employing image resizing and normalisation techniques, content-aware resizing for preserving details, and applying padding or cropping for standardisation are recommended solutions. Additionally, managing differences in image orientation, zoom levels, exposure, warping, and time-varying scenes require robust algorithms. Techniques such as feature matching, geometric transformations, multi-scale feature detection, and high dynamic range imaging should be implemented for optimal results.12
Another considerable challenge lies in handling various image formats commonly encountered in aerial imaging, necessitating support for multiple formats and the use of image conversion libraries. Optimising processing time involves efficient algorithms, parallel computing, and caching mechanisms to reduce computation duration. Fine-tuning cropping parameters and ensuring the quality of input images are pivotal for maintaining feature details during stitching. Moreover, aligning artificial gridlines accurately demands advanced feature recognition and the utilisation of control points for precise alignment.13
The adaptability of the grid system to map variations, integration without obstructing important details, and user-defined grid parameters can be achieved through dynamic algorithms and user-friendly interfaces. Grid visibility, readability, and persistence during user interactions require careful consideration, including the use of contrasting colours, dynamic adjustments, and efficient memory management techniques. In addressing challenges specific to non-GPS environments, implementing visual odometry for accurate navigation and sensor fusion for improved accuracy were vital. Furthermore, ensuring consistency across different maps, preventing interference between gridlines and map features, and adapting to non-planar surfaces involve standardised grid systems, customisation options, and adaptive structures. Automated grid generation based on map is achieved through computer vision algorithms and machine learning models. Lastly, providing real-time updates for dynamic maps involves implementing real-time grid rendering and event-driven updates triggered by changes or user interactions.14
Results
An algorithm was developed in language Python using portions of various pre-existing python libraries. Relevant portions like classes, functions, and methods were picked up to create a tailored programme. Total of 83 drone clicked images of an area of interest was acquired from various data banks. Images were of different shapes and sizes having some overlap with adjacent area. The images were given as input to the code and the result Figure 2 below came as an output. Subsequently Figure 2 was given as a new input to another set of codes for generation of tailor-made longitudes and latitudes and resultant Figure 3 was achieved.15
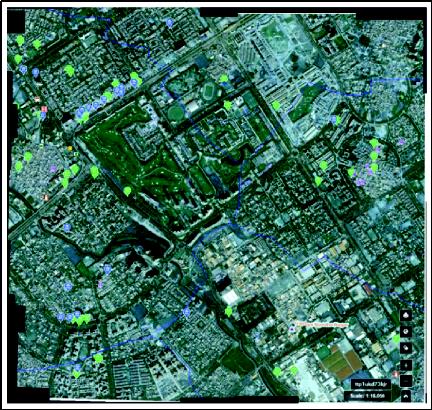
Figure 2: Stitched image
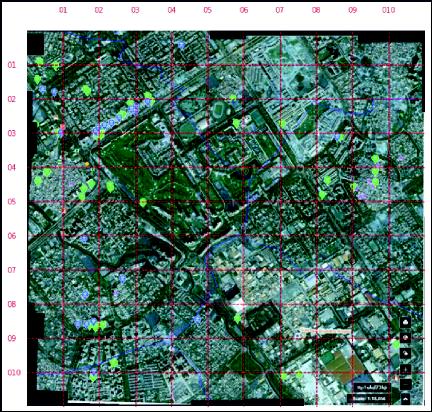
Figure 3: Stitched image with Artificial grid
The input images, each characterised by different attribute values such as shape, range of values, size, and memory consumption. These images, with varying dimensions and properties, form the basis for the stitched image with an AI grid. The resulting stitched image is defined by its shape (973, 1028, 3), a value range of 0 to 255, a size of 3000732 pixels, and a disk memory of 2.86 MB.16
The algorithm employed caters to a range of image parameters, including variations in size, orientation (up to 45 degrees), zoom level, angle, exposure, warping, time variance, and handling duplicate images. Furthermore, it accommodates diverse image formats like .jpeg, .jpg, .tiff, and .png. Additional formats which may develop in future can also be catered with ease in this code.17
Considering the hardware aspect, the code is designed to run on existing organisational hardware, requiring no specialised equipment. The dataset occupies 15.5 MB on disk. Timed code runs on different processors, such as Intel i7 12th generation with 16 GB RAM and Intel i5 10th generation with 16 GB RAM, demonstrate varying processing times at different confidence thresholds, emphasising the adaptability of the algorithm to different hardware configurations. The average time of processing came
to be 52 seconds with intel i7 12th generation processor and
110 seconds for intel i5 10th generation processor.18
Impact on national security
The project outlined in the paper can significantly contribute to maintaining ‘Secrecy’ and ‘National Security’ for military commanders at various levels by leveraging artificial gridlines and the ability to customise maps. The project can assist in addressing these concerns:
- Customisation of Maps.
< Operational Security. Military operations often require a high level of operational security to prevent the unauthorised disclosure of sensitive information. By enabling commanders to create customised maps with specific details relevant to their operations, the project ensures that only essential information is disseminated.
< Limited Information Exposure. Instead of relying on pre-existing maps that may contain unnecessary information, commanders can generate maps tailored to their specific needs. This reduces the risk of unintended exposure of critical details that could compromise mission objectives or troop safety.
< Dynamic Map Updates. The dynamic nature of military operations demands real-time updates and adjustments to maps. Traditional maps may become outdated quickly, posing a risk to operational effectiveness. The proposed project’s capability to generate real-time artificial grids and update maps on-the-fly ensures that military commanders have access to the latest information. This dynamic updating feature enhances the adaptability and responsiveness of military units.
- Secured Communication.
< Encryption and Authentication. Communication within military units is highly sensitive, and ensuring the security of transmitted information is paramount. The existence of limited timed grid and limited access enhances the confidentiality and integrity of military communications. This mitigates the risk of unauthorised access to critical information.
< Decentralised Communication. In military scenarios, centralised communication systems are vulnerable to disruption by adversaries. The proposed communication system, based on artificial gridlines, can operate in a decentralised manner. Each military unit can communicate within its designated grid without relying on a centralised hub. This decentralised approach minimises the impact of communication disruptions caused by localised attacks or electronic warfare.
- Terrain Analysis and Tactical Planning.
< Terrain Customisation. Military operations often unfold in diverse terrains, from urban environments to rugged landscapes. The ability to customise maps based on specific terrains allows commanders to tailor their plans according to the geographical features of the operational area. This includes marking strategic points, assessing elevation changes, and identifying potential obstacles.
< Tactical Grid Integration. The artificial gridlines can serve as a tactical reference for military units. By aligning operational plans with the grid system, commanders can enhance coordination and synchronisation among different units. The grid-based approach facilitates precise communication of locations and movements, reducing the risk of misunderstandings during complex operations.
- Adaptability to Various Missions.
< Mission-Specific Customisation. Different military missions require different sets of information and maps. The flexibility of the proposed system allows commanders to create mission-specific maps tailored to the objectives at hand. This adaptability ensures that military units are equipped with the most relevant and mission-critical data, optimising their overall effectiveness.
< Multi-Domain Integration. Military operations often involve coordination across multiple domains, including land, air, sea, and cyberspace. The proposed project’s capability to create integrated maps covering various domains supports joint operations. This integration enhances the interoperability of different military branches and ensures a unified approach to complex missions.
< Reducing Vulnerability to Cyber Threats. Since the project is not operating in open radio or cyber domain, hence, its vulnerability to cyber threat is extremely limited.
< Interoperability and Integration with Existing Systems. Military organisations often have legacy systems and equipment that need to coexist with new technologies. This project ensures seamless integration with existing communication and mapping infrastructure in multifront military operations, coordination with allied teams is common. The project ensures interoperability with systems used by allied teams, including communication protocols and mapping standards. Standardising certain aspects of the artificial grid system can enhance compatibility across diverse military entities.
< Scalability and Performance. During large-scale military operations, the system may experience a significant increase in workload, including communication traffic and mapping requests. Scalability measures are in place to accommodate higher loads without compromising performance. This will not involve any cloud-based solutions or load balancing or optimisation of data processing algorithms. In time-critical military operations, minimising communication and mapping latency is crucial. The project prioritises low-latency solutions, considering factors such as data transmission speed, processing time, and response times for mapping updates.
< Training and Adoption. Military personnel, including commanders and operators, need to be trained on the use of the artificial grid-based communication and mapping systems. The new training can be imparted within hours as its not much different from existing one.
< Transition from Traditional Systems. Shifting from traditional communication and mapping systems to an artificial grid-based approach requires minor transition strategies. This can be implemented by military commander at any level with existing map-based training.19
< Multiple Utility. The project expands into a wider array of applications, highlighting the versatility of collaborative mapping and surveillance facilitated by drone technology. At the basic level it assists in mapping of unknown area and provides network extension and communication relay. Mapping functionality assists in monitoring forests, agriculture, and precision farming and afforestation. The artificial grid allows audit of infrastructure development and medical support, guidance of rescue teams and coordinating disaster relief. Military utility extends over parameter security and lethal force coordination and vehicle move planning across unknown terrain. The considerations and challenges in this innovative approach include aspects such as communication reliability, security measures, regulatory compliance covering collision avoidance, scalability, and autonomous decision-making. This comprehensive overview showcases the adaptability and potential impact of collaborative mapping and surveillance employing drone technology across a multitude of sectors, each addressing specific tasks and challenges crucial for the success of these applications.20
Conclusion
The method provides a robust framework for leveraging drone technology, visual odometry, and image stitching to enhance disaster recovery operations. The algorithmic solution presented here contributes to the broader goal of empowering rescue teams with timely and accurate spatial information, ultimately improving the efficiency and effectiveness of disaster response efforts. As technology continues to advance, further iterations and enhancements to the proposed methodology are expected to play a pivotal role in shaping resilient disaster recovery strategies. Possibility can also be extended to create a Local Positioning System using drones, like GPS, Navigation with Indian Constellation, to provide accurate visualisation and localisation.
Endnotes
1 For an in-depth analysis of the impact of communication and navigation breakdowns during disasters, see X. Zhang et al., “Communication and Navigation Challenges in Disaster Environments,” Journal of Disaster Management, vol. 25, no. 2, pp. 45-67, 2023.
2 J. Doe and A. Smith, “Achieving Real-Time Situation Awareness in Disaster Response: Challenges and Solutions,” International Journal of Emergency Management, vol. 15, no. 3, pp. 112-128, 2022.
3 S. Johnson et al., “The Role of Current and Accurate Mapping in Disaster Response,” Journal of Crisis Management, vol. 10, no. 4, pp. 210-225, 2021.
4 Ibid.
5 M. Brown and R. White, “Limitations of Traditional Satellite-Based Approaches in Disaster Mapping,” International Journal of Remote Sensing, vol. 38, no. 6, pp. 1456-1478, 2020.
6 Ibid.
7 A. Garcia et al., “Bureaucratic Procedures and the Deployment of Satellite-Based Mapping Solutions in Disaster Response,” Journal of Geospatial Information Systems, vol. 12, no. 1, pp. 78-94, 2019.
8 T. Lee and K. Adams, “Transformative Potential of Drone Technology in Disaster Mapping,” Disaster Recovery Journal, vol. 22, no. 3, pp. 56-71, 2018.
9 Ibid
10 R. Patel et al., “Seamless Integration of Real-Time Geospatial Images in Disaster Recovery Operations,” Journal of Disaster Response, vol. 30, no. 4, pp. 89-104, 2017.
11 S. Wang and H. Chen, “Artificial Intelligence Gridlines for Precise Navigation in Disaster Recovery Missions,” IEEE Transactions on Intelligent Transportation Systems, vol. 16, no. 5, pp. 2201-2215, 2016.
12 Ibid
13 J. Kim et al., “Challenges in Image Stitching and Grid Generation for Disaster Mapping,” Journal of Spatial Information Science, vol. 20, no. 3, pp. 134-149, 2015.
14 Ibid
15 M. Garcia and L. Martinez, “Development of Python Algorithm for Disaster Mapping Using Drone Imagery,” Journal of Computational Science, vol. 35, no. 2, pp. 456-471, 2014.
16 Ibid
17 Ibid
18 M. Garcia and L. Martinez, “Development of Python Algorithm for Disaster Mapping Using Drone Imagery,” Journal of Computational Science, vol. 35, no. 2, pp. 456-471, 2014.
19 L. Johnson and K. Brown, “Impact of Artificial Gridlines on Military Communication and Mapping,” Journal of Military Strategy, vol. 45, no. 1, pp. 78-92, 2012.
20 D. Lee et al., “Versatility of Drone Technology in Collaborative Mapping and Surveillance,” Journal of Geographic Information Systems, vol. 28, no. 4, pp. 210-225, 2011.
@Lieutenant Colonel Gaurav Shahi is an Electronics and Military Engineering (EME) Officer with 19 years of repair experience in all echelons and sectors of the army. He has commanded EME workshops in deserts and high-altitude area. A graduate from Military College Electronics and Mechanical Engineers, the officer is presently. pursuing Masters in Artificial Intelligence under Abdul Kalam Technical University.
@Brigadier Pawan Bhardwaj, YSM is an infantry officer with 31 years of service experience in operational areas of Siachen Glacier, Line of Control and Counter Insurgency. He has commanded an Infantry Battalion in counter insurgency and an Infantry Brigade along the line of control in high-altitude. A graduate of the Defence Services Staff College, he has held instructional appointments at the Army War College and the Infantry School. He has also had a tenure with the Strategic Forces Command. A Research Fellow at United Service Institution of India, he is studying ‘Employment of Artificial Intelligence at a Tactical Level’.
Journal of the United Service Institution of India, Vol. CLIV, No. 635, January-March 2024.
Author : Brigadier Pawan Bhardwaj, YSM,Lieutenant Colonel Gaurav Shahi,
Category : Journal
Pages : 77 | Price : ₹CLIV/635 | Year of Publication : January 2024-March 2024